5s
+1
Submission successful!




Método de arrefecimento: Refrigeração por ar
Classificação dos graus: Proteção IP54
Potência nominal: 10 kW
Material da lâmina: Liga de alumínio
Tipo: Gerador de energias eólicas
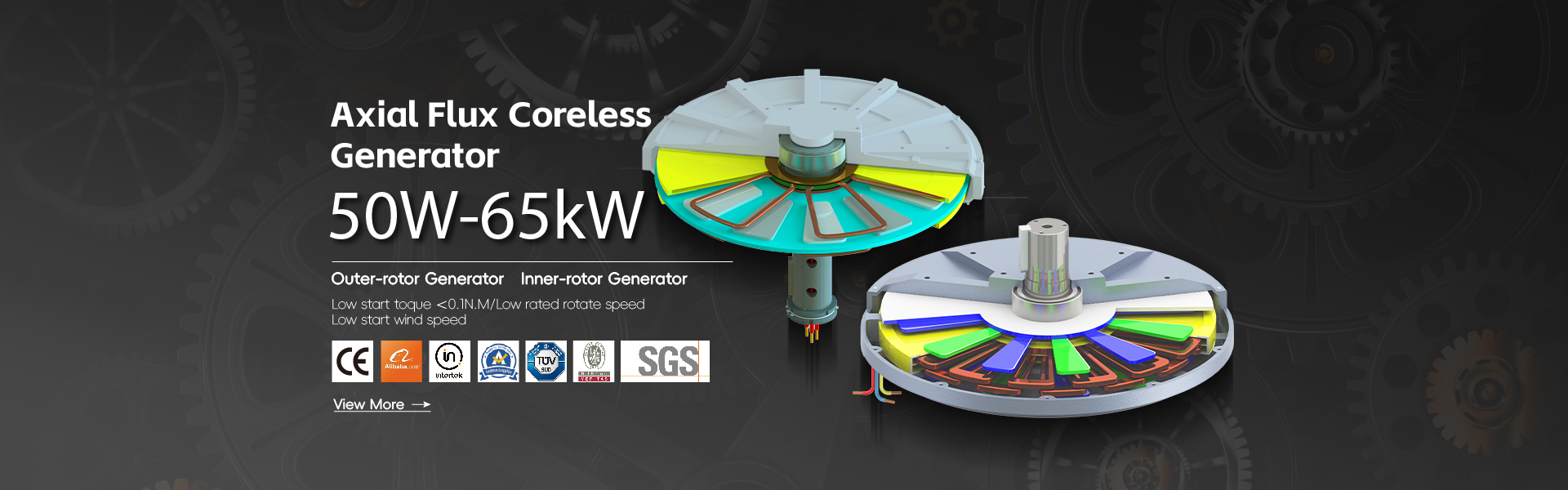
potência nominal: 300w-30kw
Torque do começo: < 0,3 N.M.
Tensão de trabalho Rated: DC400V/DC240V
Velocidade do vento avaliado: 11.5 M/s
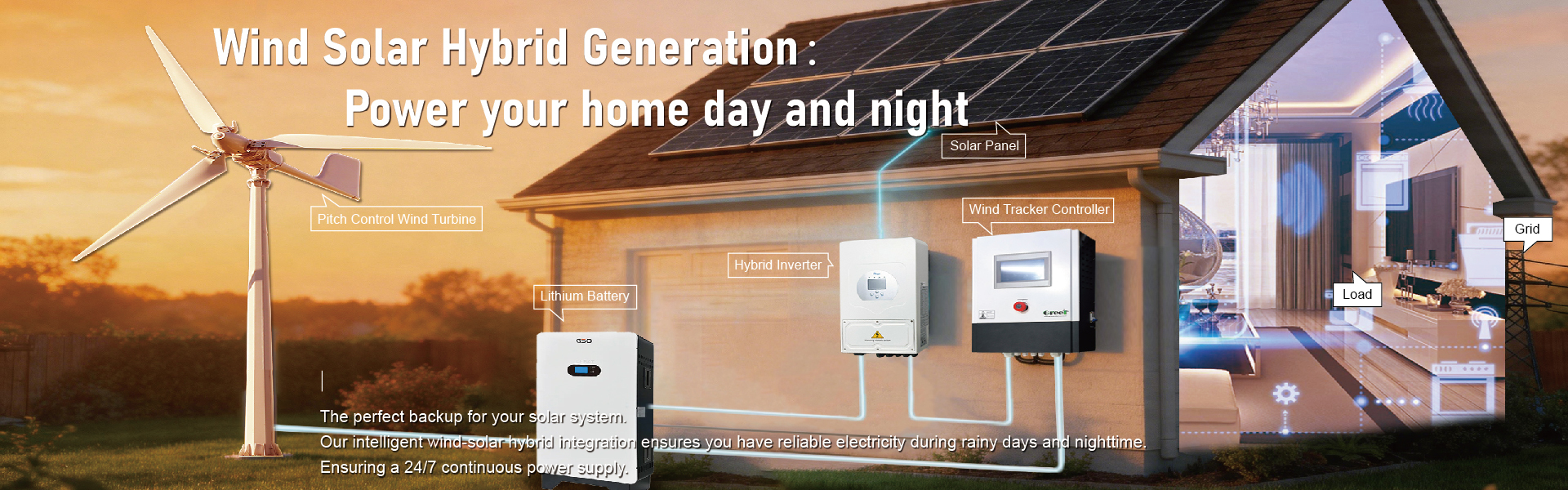
Nome do produto: Conversor Híbrido
Potência nominal (KW): 100kw/150kw/200kw/250kw/300kw/500kw/600kw/700kw/800kw/1000kw
Frequência de saída: 50 Hz / 60 Hz


 english
english
 français
français
 Deutsch
Deutsch
 Italiano
Italiano
 Русский
Русский
 Español
Español
 português
português
 Nederlandse
Nederlandse
 ελληνικά
ελληνικά
 日本語
日本語
 한국
한국
 العربية
العربية
 हिन्दी
हिन्दी
 Türkçe
Türkçe
 indonesia
indonesia
 tiếng Việt
tiếng Việt
 ไทย
ไทย
 বাংলা
বাংলা
 فارسی
فارسی
 polski
polski


